

扫一扫咨询详情

全国咨询热线:
400-626-0576
扫一扫咨询详情
全国咨询热线:
400-626-0576
联系热线
机器人手臂操作系统实验中,X,Y,Z,U,V,W,L,S,H以及后机器人X,Y,Z,U,V,W,H,L,S资料。X:腰回转角度,Y:肩回转角度,Z:肘回转角度,U:腕俯仰角度,V:腕摆动角度,W:腕旋转角度,L:机械手在传送带上的位置,S:机械手的速度,H:机械手开合状态,0代表开启,1代表闭合

六轴工业机器人一般有6个自由度,常见的六轴工业机器人包含旋转(S轴),下臂(L轴)、上臂(U轴)、手腕旋转(R轴)、手腕摆动(B轴)和手腕回转(T轴)。6个关节合成实现末端的6自由度动作。

现在说一个比较专业的问题,很多人对这个也是有疑问的,那么就请您跟随小编的视角了解一下四轴机器人和六轴机器人的区别:主要挑选机器人的两种基本类型:四轴SCARA机器人(以下简称四轴机器人)和六轴关节式机器人(以下简称六轴机器人),向大家阐述其区别。其中,四轴机器人是特别为高速取放作业而设计的,而六轴机器

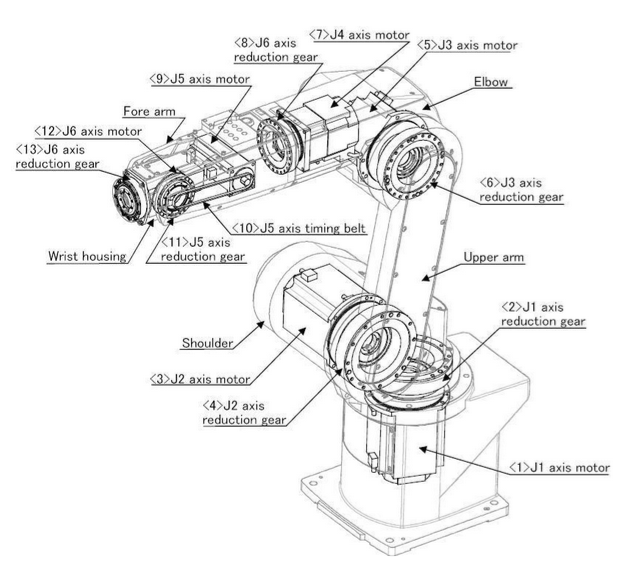
常见的六轴关节机器人的机械结构,六个伺服电机直接通过谐波减速器、同步带轮等驱动六个关节轴的旋转,注意观察一、二、三、四轴的结构,关节一至关节四的驱动电机为空心结构,关节机器人的驱动电机采用空心轴结构应该不常见,空心轴结构的电机一般较大。
人们常说橡胶粉碎机,那么它究竟是干什么用的呢?其实,橡胶粉碎机是人们根据我国的可持续发展的政策并且结合我国的环境保护所研发的一款环保型机械设备。简单的来说,它就是一种为环保事业做贡献的一种机械,这种机械能保护环境,可以减少粉尘对环境的污染。


微信二维码
服务热线